 "
"
Team:Peking/Modeling
From 2012.igem.org
m |
|||
| Line 10: | Line 10: | ||
<h3 id="title1">Summary</h3> | <h3 id="title1">Summary</h3> | ||
<p> | <p> | ||
| - | Our Modeling group conducted modeling to guide the optimization of our <i>Luminesensor</i>, combining protein kinetics, thermodynamics, and stochastic simulation with molecular docking together. Thereby the mutagenesis is indeed rationally guided by our modeling result! Then we simulated the process of Phototaxis both | + | Our Modeling group conducted modeling to guide the optimization of our <i>Luminesensor</i>, combining protein kinetics, thermodynamics, and stochastic simulation with molecular docking together. Thereby the mutagenesis is indeed rationally guided by our modeling result! Then we simulated the process of Phototaxis both on the macro level -- Mean-field PDE (partial difference equations) and on the micro level -- Stochastic Simulation. In the PDE model, we developed a hexagonal-coordinate simulation environment for dynamic system on a continuous plane, which would be a very useful prototype for future simulation on cellular movement, pattern formation and other potential systems. |
<p> | <p> | ||
</div> | </div> | ||
Revision as of 18:33, 26 September 2012










![]()
Summary
Our Modeling group conducted modeling to guide the optimization of our Luminesensor, combining protein kinetics, thermodynamics, and stochastic simulation with molecular docking together. Thereby the mutagenesis is indeed rationally guided by our modeling result! Then we simulated the process of Phototaxis both on the macro level -- Mean-field PDE (partial difference equations) and on the micro level -- Stochastic Simulation. In the PDE model, we developed a hexagonal-coordinate simulation environment for dynamic system on a continuous plane, which would be a very useful prototype for future simulation on cellular movement, pattern formation and other potential systems.
Luminesensor Modeling
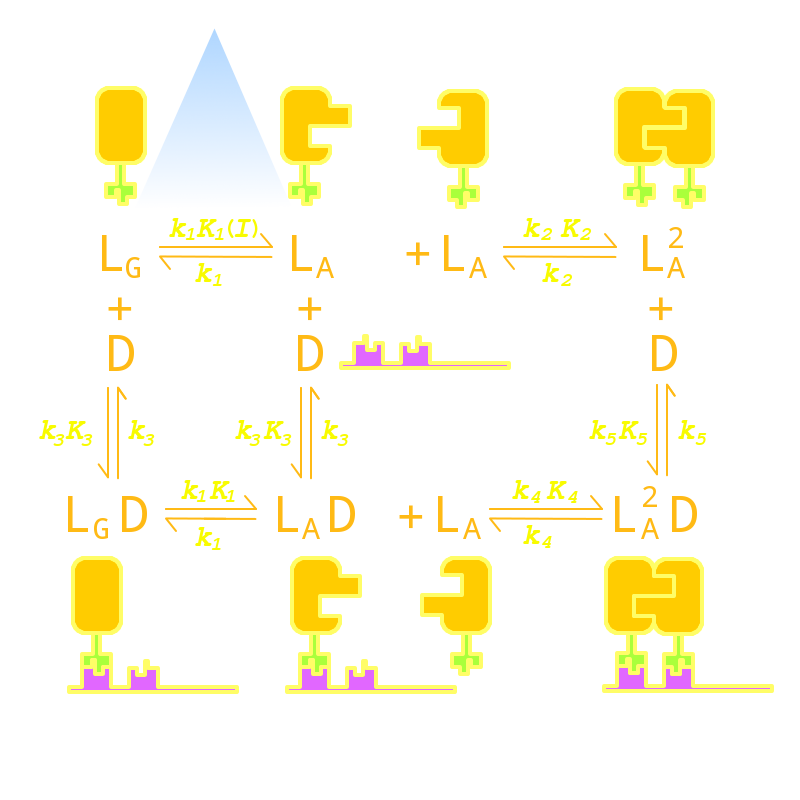
Our Luminesensor is a ultra-sensitive fusion protein to sense 450nm to 470nm light and then regulate the gene expression.(spectrum data here) Although Luminesensor excels and eclipses similar systems due to its ultra-sensitivity and dynamic range, there are still several imperfect aspects. For example, the response time of the protein can be up to hours[1] and the contrast of binding efficiency with and without light has much room for improvement. After modeling the DNA binding process of Luminesensor, we managed to find out four key parameters, two of which mainly control the response time, and the others control the contrast of binding efficiency. According to the feasibility in experiment, we tuned two most facile parameters of each aspect to optimize the performance of Luminsensor, and later figured out mutation sites related to these two parameters experimentally.
Phototaxis Modeling
Phototaxis is a light-control bio-system, whose input is the space-distribution of light. By comparison with chemotaxis system, phototaxis has much advantages for application.(see Phototaxis Page in Project) We have constructed a simple phototaxis system coupling our Luminesensor with the expression level of cheZ protein. In order to confirm the macro light-control to our phototaxis system, we used the Mean-field PDE model. Later we managed to confirm these phenomena by tracing each cells in a micro way. We then did the related experiments to prove the effect of light in this simple system.
On the way to the simulation of the macro population changing process, we developed a hexagonal-coordinate simulation environment for dynamic system on a continuous plane. Since the neighbors of a chunk unit in the hexagonal mesh are better than the traditional quadratic mesh in quantity, the hexagonal mesh is closer to an isotropic grid, which would reduce the problems caused by anisotropic mesh. This simulation environment would be a useful prototype for future simulation of 2D dynamic system.
Reference
- 1. Zoltowski, B.D., Crane, B.R.(2008). Light Activation of the LOV Protein Vivid Generates a Rapidly Exchanging Dimer. Biochemistry, 47: 7012: 7019



