 "
"
Team:Cornell/project/drylab/components
From 2012.igem.org
(Difference between revisions)
| Line 328: | Line 328: | ||
<div class="three columns"> | <div class="three columns"> | ||
<a href="https://static.igem.org/mediawiki/igem.org/0/0c/Compred_17.jpg" rel="lightbox"><img src="https://static.igem.org/mediawiki/2012/c/c4/Reduced17.jpg"></a> | <a href="https://static.igem.org/mediawiki/igem.org/0/0c/Compred_17.jpg" rel="lightbox"><img src="https://static.igem.org/mediawiki/2012/c/c4/Reduced17.jpg"></a> | ||
| - | <a href="https://static.igem.org/mediawiki/igem.org/c/c7/PHONE_hq.jpg" rel="lightbox"><img src="https://static.igem.org/mediawiki/2012/1/1b/Cornell12_android.jpg"></a> | + | <a href="https://static.igem.org/mediawiki/igem.org/c/c7/PHONE_hq.jpg" width="200" height="150" rel="lightbox"><img src="https://static.igem.org/mediawiki/2012/1/1b/Cornell12_android.jpg"></a> |
</div> | </div> | ||
</div> | </div> | ||
Revision as of 03:14, 27 October 2012








-
Dry Lab
- How It Works
- Functional Requirements
- Components
- Modeling
- Device Status
- 3D Model
Components
Reactors
Requirements
For the device to detect toxins requires a continuous culturing of Shewanella biofilms around the working electrode of a half microbial fuel cell. Food and water samples must also be continually supplied within the reactor. The reactor must emulate the surface area and volume of the glass reactors we used in the Angenent Laboratory for characterization. Finally, the device must be able to be sterilized and allow for sterile loading of Shewanella within the reactor at start-up.Design
The design went through several iterations during the semester. After multiple home-design options, we concluded a 100 ml volume cylinder composed of polycarbonate and sealed with silicone sealant. Two graphite electrodes (a working and counter electrode) and a Ag/AgCl reference electrode. Five ports on each end of the reactor were included to allow sterile loading, food feed, and electrodes. 00Material Selection
Because we are detecting current, the entire composition of the reactor needs to be non-conductive except for the electrodes. The polycarbonate structure accomplishes this requirement in addition to being durable and chemically resistant. Graphite electrodes were used since other metals could be potentially toxic to Shewanella. The Ag/AgCl electrode was constructed using an impact-resistant glass which is resistant to corrosion.Assembly
We machined the polycarbonate housing in the Emerson Machine shop in Rhodes Hall. Graphite electrodes were ordered from McMaster, and the reference electrodes were constructed by a professional glass blower in Olin Chemistry Hall. The components were sealed using silicone sealant in our Weill Hall laboratory space. Testing was performed with sterile water to ensure a leak proof construction was achieved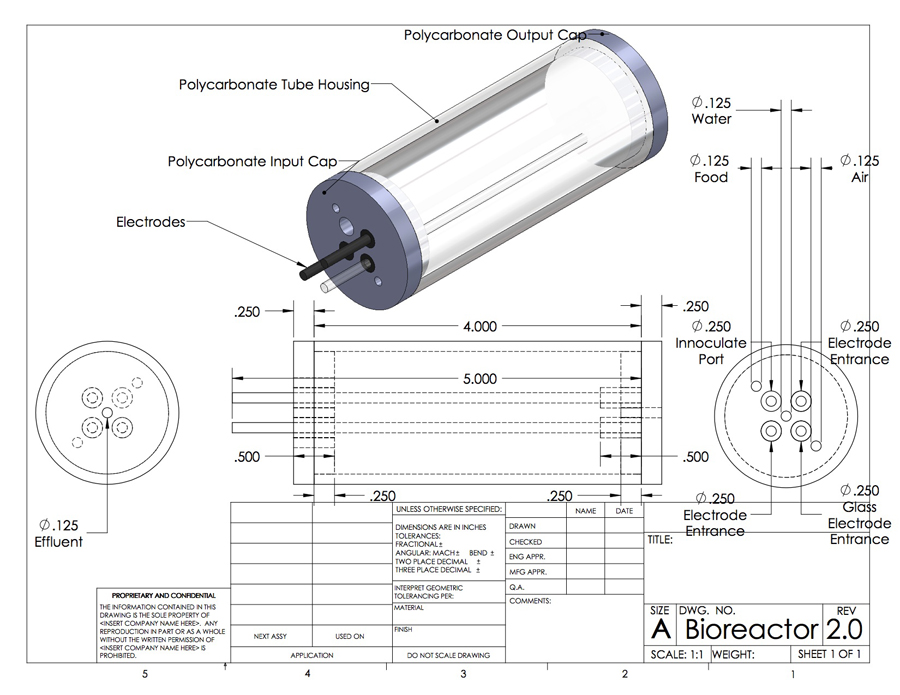



Filtration
Requirements
From an environmental safety perspective, the filters were one of the most important components. We required filters which could completely prevent microbes from entering or leaving the system. This constraint requires extremely reliable, and ultrapurifcation quality filters.Design
After researching, we ultimately chose the SWT 0.1 Micron Absolute Rated Filter. Given the diameter of most bacteria ranges from 0.2-2.0 micron, and the absolute 100% rating of the filter, the filter easily qualified.Materials
The filter cartridges are composed of 100% polypropylene membranes which have a failure rating of 65 PSI. Additionally, their lifetime are rated at 200 gallons, which equates to nearly 5 years of continuous operation at 0.3 ml/min.Assembly
The filters were housed in a polycarbonate framing with threading leading to an inlet and outlet stream.Pumps
Requirements
Continuous monitoring requires a steady inflow of sample fluid to be supplied to the bioreactor. Given an operational lifespan of at least 6 months using battery power supplemented with solar also required a low power draw. Finally the flow rates required for a 100 ml continuous flow reactor are less than 1 ml/min.Design
After researching low power draw pumps, we decided on the Bartels Mikrotechnik mp6 Micropump. The pump uses two extremely small actuators which increase the flow of the fluid with a greater frequency supplied to the pump. Since the flow rates are so small, the pressure head associated with the filters does not exceed the 600 mbar maximum. A mp6-EVA electronic controller was also purchased from Bartels which allows external tuning of flow rate. The original controller can only be supplied with at 2.5-5 V voltage source, so a step-down was necessary to be compatible with the battery inside the device.Material
Contamination and corrosion are always a concern in continuous operation. A benefit of the mp6 micropump is that all surface in contact with the fluid is PPSU (polyphenylsulfone) , a heat and chemical resistant plastic.Assembly
The micropumps were received in June to perform autoclaving testing on the parts. In October, after the remainder of the device was assembled, the micro pumps were put online in the device and confirmed the ability to supply continuous flow through the entire device including the two filters, mixer, reactor and piping.



Piping and Instrumentation
Requirements
To connect each component of the system including the filters, food tanks, sample ports, and mixer requires a leak-proof, durable system. Additionally we required methods to calibrate the flow rate of the fluids throughout the device, so pressure gauges and flow meters are necessary.Design
After several drafts, our ultimate design was combination of 304/316 stainless steel piping, valves, and adapters. FEP durable plastic tubing was used for connections between filters and ports which require flexibility when servicing or reparing the device. A stainless steel in-line passive mixer was included to avoid power drains from mechanical mixing. Two pressure gauges were included along the wetted path to provide readings for calibration. Two 0.01-4 ml/min flow meters were added as well. The fluid can be diverted from the calibration system using a 3-way diverter valves. Precision needle valves were included after the feed out from both micropumps to control flow rate.Materials
Both stainless-steel and fluorinated ethylene propylene plastics are sturdy and corrosion resistant. All fittings in the system were also 304/316 stainless steel. In summary, these components allow an extremely tight-fitting system which should avoid leaks for extended operationsFood Tanks
Requirements
Food storage vessels for long-term field deployment must be durable, corrosion resistant, and autoclavable to prevent initial contamination. To avoid damage to electronic components necessitates a leak-proof design.Design
A battery of six one liter cylinders was chosen for its modularity and ease of fabrication.Material Selection
The choice of materials depended on the cost and durability of that material. Since we have had prior experience with polycarbonate, we decided it would be best to continue to use polycarbonate as the material for the containers. Polypropylene was used for the end caps because it was chemically resistant and cheap.Assembly
The food tanks were all machined in-house at the Rhodes Hall Machine shop. The polycarbonate clear tubing was glued together with the polypropylene via a super silicone sealant adhesive to form a clean and strong seal.



Housing
Requirements
The requirements that we found necessary for the chassis to operate were keeping it water-proof and impact resistant. Ultimate deployment would be in harsh environments and necessitates protective measures to prevent water supply from damaging electronic componentsDesign
The design went through several iterations during the semester. After multiple home-design options, we concluded a Pelican heavy duty case would provide the support and safety we required. Not only was it sturdy and water-proof, but it was also large enough to be buoyant in water with up to 180 lbs of load.Material Selection
The polycarbonate material for the Pelican case was ideal in terms of stress and other parameters to handle the harsh wilderness.Assembly
Modifications to the Pelican case were performed to meet the of electrical components and supply of water samples to device. A 15 W solar panel was retrofitted to the lid of the case to provide replenish power supply. Inlet/outlet ports were drilled to allow piping system coming out of the top to serve as inlet and outlet ports for the water to enter and exit the device. A joint piece between the solar panel and power adapter was fabricated to serve as waterproofing connections from the Pelican case. Aluminium honey-comb plating was included and cut to size using water-jetting to act as both a housing for food tanks and batteries, and provide structural suppor.Power
Requirements
To be deployable for the of target six months of operations requires an autonomous electrical source in the wild without human repair or maintenance, recharge and store energy for extended periods of time. A rugged device must also be able to survive bear attacks and tree falls, all while being environmentally friendly and light enough to allow for floatation.Design
After a series of designs, we chose a LPG Series gel electrolyte valve-regulated lead acid battery (LPG12-100) from Leoch with a 15W mono-crystalline solar power panel from Instapark. While lead acid batteries have the highest charge time and the lowest specific energy density, they are by far the most reliable and durable batteries. Commonly used in boats and in conjunction with solar systems, they are reliably sealed, well characterized, and easy to charge and operate with microcontrollers and other complex circuitry. With a wide operating temperature, the model is also insensitive to occasional deep discharge and has a high charge acceptance, key features for unpredictable solar recharge conditions in the field. It is shock and vibration resistant and can be used in any orientation. Out of all the proposed systems, this model also provided the best current output and voltage necessary to power the rest of our mechanical and electrical parts. It also came cheap. The maximum current draw of the battery is 0.89A and was shipped with a 12V charger controller, which prevents overcharging.Materials
We were greatly concerned with the toxicity of some gel lead acid batteries, which is why our initial prototype actually did not feature one. However, other less toxic battery systems are not as robust and have a smaller operating temperature range, with some prone to short-circuiting. Valve-regulated and tightly sealed, all components of the LPG12-100 are fully recycle and specially designed for outdoor usage. The solar power panel has its mono-crystalline solar cells embedded in transparent vinyl acetate behind tempered glass with heavy back sheet.Assembly
We would like to give a special thanks to Professor Bruce Land, a Senior Lecturer in the Department of Electrical and Computer Engineering at Cornell, for his advice and guidance. The battery was easily integrated into the chassis of the device without alterations.



Potentiostat
Requirements
The potentiostat is used to provide and maintain a voltage potential between the working and reference electrode of the reactors. It also interfaces with the counting electrode to provide a measurement for its current flow. This measurement is recorded and sent to an Android device.Inputs
Reference Electrode (RE)
The reference electrode is one of three electrodes in reactor solution. This electrode measures the potential of the solution, which is mostly water with salts and nutrients. The potential measured by this electrode sets the reference potential for the rest of the potentiostat.Working Electrode (WE)
The working electrode sets the voltage differential for the reactor solution and causes current to flow through the reactor.. The target potential of the WE depends on the bacteria in the reactor. The calibrated potential should create favorable living conditions for the bacteria. For our Shewanella, we must provide 0.2 - 0.3V above the reference electrode voltage.Counting Electrode (CE)
To counterbalance the current injected into the solution, the CE acts as a current sink. As bacteria in the reactor grow, they will generate a different amount of current that will be measured by the CE. The generated current, in our case, is between 0 and ~100 uA.Power Supply
We power the system with the 12V battery, and by using an op-amp voltage follower and resistive voltage divider, we define a voltage reference for the system. In this, ground is 6V, so 12V is 6V above ground and 0V is -6V below ground. The +/- 6V references are used as the sources for the electrical system.Electrical Design
We designed this system using operational amplifiers (op-amps), due to their robustness in different operating conditions in comparison to a passive resistor and capacitor based system; we used LM353 integrated circuits to provide these op-amps. This system into four parts: desired voltage differential specification, reference electrode voltage measurement, working electrode output, and counting electrode current measurement. We base this design from a freely available potentiostat design created by Elliot Friedman and Alexander Hartoto, available here.
As seen in the above diagram, the system uses various op-amp configurations to accomplish our task. The desired voltage differential is set using a resistive voltage divider and a potentiometer, configurable for different voltage requirements through potentiometer tuning. This differential is added to the reading from the reference electrode using a voltage summing op-amp. Another op-amp is connected to the reference electrode to act as a voltage follower. This voltage is then inverted using an additional inverting op-amp, with equal feedback resistances to provide no gain. This lets us set our potential. Lastly, we measure the current from the counting electrode by connecting it to two op-amps configured as a non-inverting current to voltage converter. This provides our voltage output for the microcontroller, in the range of 0 to 5 volts.
Microcontroller Design
The measurement from the electrical design is fed into an Arduino megaADK. This is an analog voltage measurement, so it is converted using an onboard analog-to-digital converter and stored in the device. Using serial communications, the measurement is transmitted via a USB interface to an Android device. We sample this measurement at 125 kHz, constantly sending new information serially.Material Selection
Our components for this system were chosen based on the types of inputs we would receive from the electrodes and the operating range of the device - we also needed to make sure our output could interface with the microcontroller. Since the required voltage differential is specific to the engineered strain of bacteria present in the reactor, we made our voltage divider using a potentiometer to provide variable resistance. This can be calibrated based on the requirements of the device. In order to choose the conversion factor between the voltage output and measured counting electrode current, we also had to depend upon the current range of the reactors, expected to be from 0 to 60 micro amperes. We chose a megaADK Arduino development board with an onboard Atmel ATmega2560 microcontroller to process this voltage input. This board provides us an easy Android interface for sending data and includes a 10-bit analog to digital converter, which gives us a measurement resolution of 97.7 nano amperes.Software
Requirements
The method of data transfer had to be easily fixed, and supportive of some long distance information transfer. The first criterion is due to the nature of the biosensor. Since the device would ideally be outside braving the weathers for six months, we need it to be quickly replaced. Furthermore, the biosensor had to be able to transmit data; it would be inconvenient if someone had to frequently go to the device to check the voltage readings.Design
An Android phone was chosen as the best fit for the project as it satisfied both requirements. Notably, it achieved the distance criterion well – as long as a cell tower was nearby, the information on the phone could be accessed from anywhere with an internet connection. Furthermore, there existed a wide range of support for Android development that did not exist for other platforms. These included tools such as the Apache API, a light weight server interface that allowed the project to run more smoothly. A server was also designed to partner with the Android device. The server was to use a MySQL table for data retrieval and access - this allowed for easy testing and modularity.Components
The choice of materials were generally the industry standard – we used the HTTP protocol to facilitate data transfer and MySQL to store the data. For the phone, Samsung’s Galaxy Nexus was chosen mostly because of the third-party support found for the phone concerning the Android to Arduino communication.Assembly
The code for the Android device was written in Java using a Microbridge project as the method of communication between the phone and Arduino. The basic Apache API was used to transfer data to a web server. For the server, the code was written in PHP and tested with WAMPserver, a development tool that allowed local hosting of the MySQL tables.
